Kamera mvPerCam jest wynikiem prac rozwojowych przeprowadzonych w celu zbadania różnych stosowanych metod 3D.
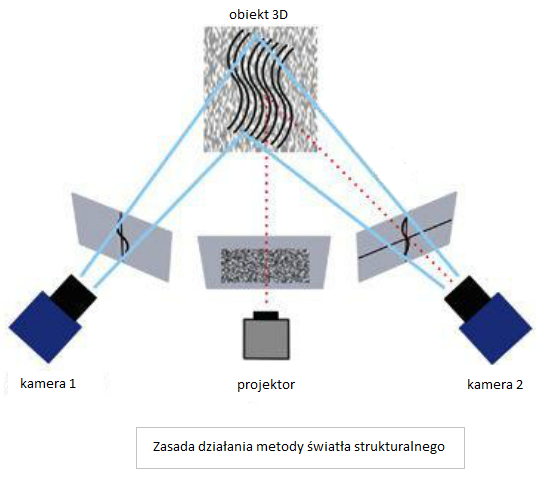
Zasada działania kamery opiera się na metodzie stereo w połączeniu z zastosowaniem światła strukturalnego. Trzecia kamera została zaimplementowana po to, by uzyskać większe pole pomiarowe oraz w celu uniknięcia konieczności ustawiania kątów i odległości innej kamery podczas produkcji. System zatem może być stosowany jako uniwersalna kamera multi-stereo. Każde z ustawień dwóch kamer pozwala na otrzymanie różnych zakresów pracy.
Procedura stereo opiera się na dopasowywaniu takich samych struktur na obu obrazach pozyskanych z dwóch kamer. Po to aby umożliwić pomiar obszarów trudnodostępnych kamera mvPerCam oświetla obiekt używając dodatkowego światła strukturalnego - nadając obiektowi dodatkową strukturę. Jednocześnie z informacją o głębi kamera umożliwia wykrycie ruchu, który w przestrzeni 3D prezentowany jest za pomocą wektorów (vx, vy, vz). Dlatego nowy system z kamerą 6D może być wykorzystywany do rozpoznawania, czy dany obiekt porusza się od lub w kierunku kamery. Dane wyświetlane są w kolorze.
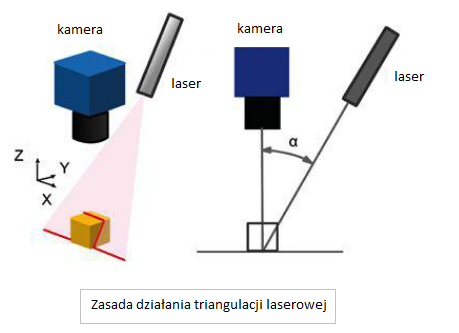
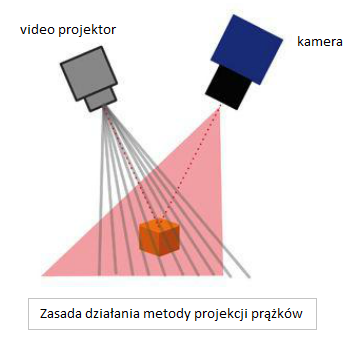
Metoda projekcji prążków świetlnych lub triangulacji laserowej charakteryzuje się wysoką rozdzielczością, która pozwala na dokładne odwzorowanie nawet obiektów znajdujących się w małych odległościach od siebie. System 3D stereo wymaga dużej rozdzielczości w osiach X i Y, która ogranicza pole widzenia oraz liczbę klatek na sekundę. Po to by rozróżnić sąsiadujące obiekty stosuje się dodatkowe światło strukturalne emitowane przez nową ulepszoną kamerę.
Przetwarzanie obszernego zbioru danych w obrazie 3D jest skomplikowanym zadaniem i wymagającym bardziej kosztownych komponentów niż w przypadku przetwarzania monochromatycznego obrazu 2D. Aby usprawnić pracę systemu wprowadzono tzw. funkcję sensoryczną - dzięki której kamera jest bardzo łatwa w użyciu i obrazowanie 3D może być stosowane w szerokim zakresie aplikacji.
Typowe obszary zastosowań kamery mvPerCam to przede wszystkim procesy pakowania i logistyczne, ale również w innych sektorach przemysłu. Kamera może z powodzeniem być wykorzystywana w operacjach sterowania robotami, paletyzacji, załadunku, transportu, w aplikacjach pick&place, pomiarowych, w kontroli produkcji i wielu innych.