Partnerzy serwisu


1. Optyczny sensor
2. Mechaniczny sensor
Zwykle jest to coś na kształt ramienia zakończonego odpowiednim dla zastosowania w konkretnej sytuacji przyrządem (wskaźnik – przy wstępnym pozycjonowaniu, frez – np. przy nacinaniu kości, inne narzędzia). Poruszanie ramieniem przez chirurga może być czasami kłopotliwe, jednak osiągana precyzja w pełni to kompensuje.
3. Dźwiękowy sensor
Technologia względnie tania jednak wiążąca się z wrażliwością systemu na zakłócenia typu: zmiany temperatury, wilgotność, zakłócenia częstotliwościowe i inne. Właściwie tylko jedna firma Science Accessories Corporation wykorzystuje tą technologię i to w niewielkim stopniu w systemach nawigacji chirurgicznej z uwagi na jej ograniczenia.
4. Magnetyczny sensor
Technologia mocno się rozwijająca i to z bardzo dobrymi efektami u wielu producentów: Polhemus, Ascension, Biosense czy Northern Digital. W systemie tym określane jest położenie małych rozmiarów „markerów”, wykonanych z odpowiedniego metalu lub ferromagnetyka, w polu elektro-magnetycznym wygenerowanym przez generator pola. Precyzja pomiaru położenia jest zbliżona do systemów optycznych. Dużą zaletą systemu są niewielkich rozmiarów „markery” (np. 1mm x 8mm). Wadą natomiast są przewody łączące „markery” i problem zakłóceń związanych z obecnością innych przedmiotów metalowych w polu.
Większość z powyższych systemów może pracować zamiennie i być wykorzystywanych w podobnych operacjach. Mogą być również rozbudowywane o kolejne urządzenia jak np. tomografy komputerowe czy urządzenia rezonansu magnetycznego, dzięki którym na ekranie nawigatora widzimy rzeczywisty obraz fragmentu ciała pacjenta zamiast modelu (np. modelu kości dopasowanego do rzeczywistej kości pacjenta – wiąże się to z pewnymi utrudnieniami). Dzięki temu chirurg, czy to w fazie przedoperacyjnej symulacji, czy też w trakcie samej operacji, dysponuje obrazem uwzględniającym specyficzną anatomię danego pacjenta.
Nowoczesne systemy pozycjonowania narzędzi dla medycyny powinny, poza aspektami ekonomicznymi, cechować się w miarę możliwości:
Systemy optyczne, szczególnie tzw. II-ej i III-ej generacji spełniają większość z powyższych kryteriów.
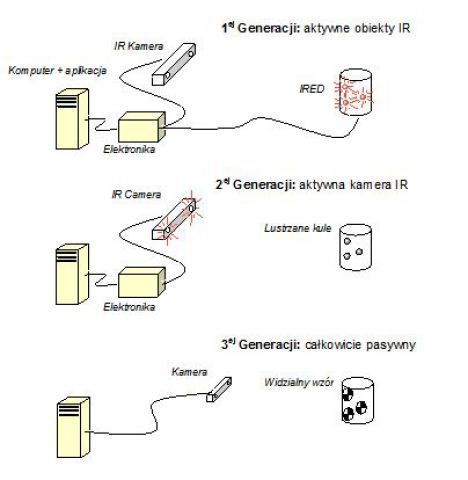
Rys. 1. Schematy działania systemów optycznych I-ej, II-ej i III-ej generacji
W systemach II-ej generacji problem przewodów czy też „markerów” z własnym zasilaniem został wyeliminowany dzięki zastosowaniu jako „markerów” elementów lustrzanych (kule), odbijających wysyłane przez „kamery” światło podczerwone – rys. 1. Po odbiciu od takich elementów, światło wraca do „kamer”, które wraz z odpowiednią elektroniką określają przestrzenne ich położenie.


Rys.2. System II-ej generacji (po prawej zdjęcie systemu Polaris firmy Northern Digital)
Mimo szeregu problemów związanych z „markerami” bezprzewodowymi opisanych w tab. 1, są one coraz chętniej stosowane w nowoczesnych systemach nawigacji w chirurgii.
Tab.1. Wady i zalety optycznych „markerów” pasywnych i aktywnych według ich producenta – firmy Traxtal

Uzyskiwane dokładności pomiaru położenia „markera” w tym systemie podawane przez producenta – firmę Northern Digital - to 0,35mm 3D RMS (średnia z 30 próbek każdego punktu pomiarowego). Dla porównania system Optotrak 3020 tego samego producenta osiąga dokładności:
W systemach III-ej generacji – w pełni pasywnych – położenie obiektu w przestrzeni określane jest na podstawie obserwacji w świetle widzialnym specjalnych wzorów„markerów” przyczepionych do obiektu. Dzięki odpowiedniej analizie obrazu z kamer„markery” (a w konsekwencji obiekty) pozycjonowane są w przestrzeni względem kamer. Do pełnego opisu obiektu w przestrzeni podawane są 3 współrzędne przestrzenne (X, Y, Z) i 3 wartości kontowe (azymut, elewacja, skręcenie)


Rys. 3. System III-ej generacji (system wizyjny firmy OptiNav)
Zalety systemu optycznego III-ej generacji w porównaniu z systemami poprzednimi:

Dokładności osiągano dla pomiarów pojedynczego markera, przy zasięgu do ok. 2,5 –3m i przy tzw. bazie kamer od 0,35 do 0,5m (odległość pomiędzy kamerami). Przy tak małej bazie (dla porównania NDI stosuje bazę ok. 1m) i odległościach pomiaru przekraczających2m największy błąd pomiaru popełniany jest oczywiście w osi Z. Pomiary w osiach X i Y są na poziomie dokładności pojedynczych mikronów. Oczywiście można znacznie poprawić dokładność pomiarów rozszerzając bazę (odległość pomiędzy kamerami), co jednak zwiększa rozmiar całkowity zestawu kamer, a pamiętajmy, że dokładności poniżej 0,5 mm są, przy
wszczepianiu endoprotez, znacznie przekraczającymi możliwości „ręki i oka” chirurga.
Należy też wziąć pod uwagę fakt stosowania w trakcie operacji zestawów 3 markerów na każdym narzędziu, obiekcie, co kilkukrotnie poprawia dokładność pomiaru, więc powyższe błędy rzeczywiste są znacznie niższe.
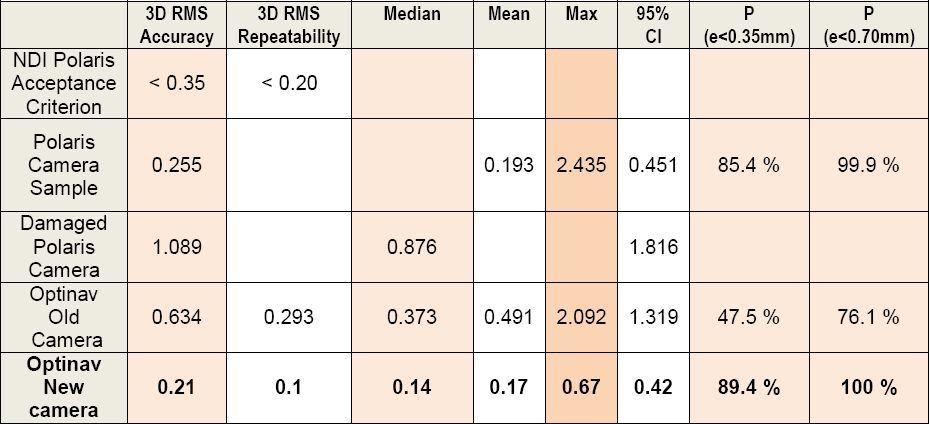
System wizyjny III generacji firmy OptiNav (pasywna kamera i pasywne markery) oraz system II generacji firmy NDI ( aktywna kamera na podczerwień, pasywne markery w postaci kulek lustrzanych) zostały porównane w tabeli 2.
Tab. 2. Porównanie dokładności kamer NDI oraz OptiNav
Wszędzie tam gdzie wymagane są małe rozmiary całego systemu, a w szczególności małe rozmiary „markerów”, możliwość zastosowania „markerów” elastycznych - czyli praktycznie dowolnych kształtów, niewrażliwość na przysłanianie (brak wzajemnej widoczności detektora i „markera”) świetnie sprawdzają się systemy magnetyczne. Określanie położenia „markerów” wykonanych z odpowiedniego metalu lub ferromagnetyka następuje w zmiennym lub stałym (pulsującym) polu elektro-magnetycznym wygenerowanym przez generator pola.
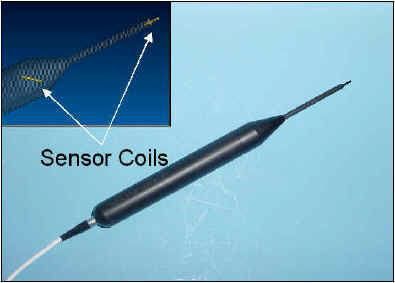
Rys. 5. Detektor megnetyczny
Dokładności pomiarów systemu magnetycznego Aurora w porównaniu z systemem optycznym Optotrak:
1. Błąd RMS
Różnica między mierzoną i faktyczną pozycją
Aurora - 1.7 mm (max = 3.8 mm)
Optotrak - 0.36 mm (max =1.1 mm)
n=361 punktów pomiarowych w 3 płaszczyznach
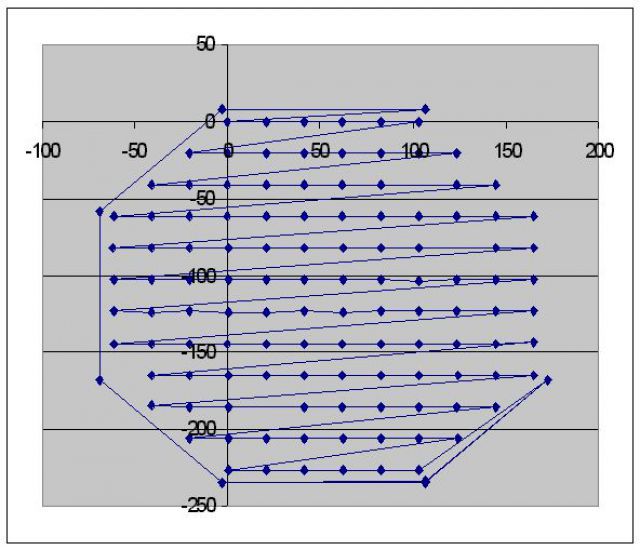
Rys. 6. Zasada pomiaru pozycji w płaszczyźnie (X, Y) i zdjęcie przyrządu
2. Rozrzut statystyczny
Standardowa dewiacja dla próby stacjonarnej
Aurora - 0.08 mm (0.16 mm max)
Optotrak - 0.008 mm (0.04 mm max)
Średnio dla n=5 prób (max z 14 prób)
3. RMS powtarzany
Standardowa dewiacja dla wielokrotnych pomiarów tego samego punktu
Aurora - 0.20 mm (max=0.48)
Optotrak - 0.07 mm (max=0.13)
n=22 próbek
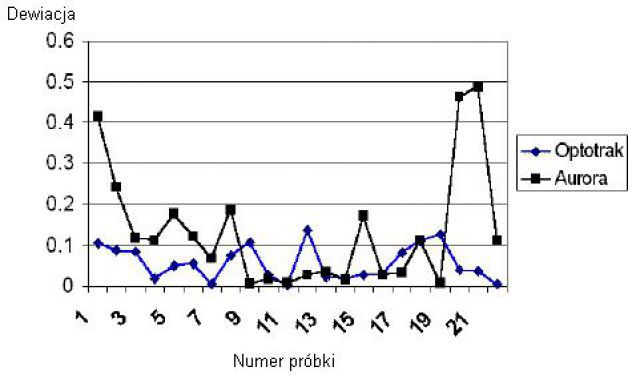
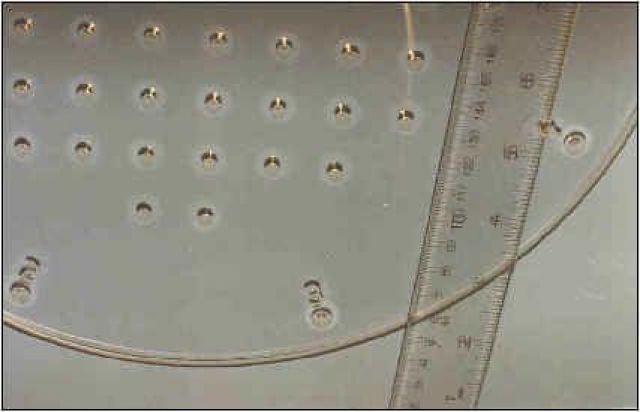
Rys. 7. Standardowa dewiacja dla wielokrotnych pomiarów tego samego punktu
4. RMS dewiacja – dla dwóch sztywno połączonych czujników
Standardowa dewiacja pomiaru położenia czujnika dla prób w trakcie poruszania
Aurora - 0.91 mm
n=1130 punktów pomiarowych
Zniekształcenia w pomiarach wynikające z obecności innych obiektów metalowych mogą być minimalizowane przez odpowiedni dobór materiałów użytych na narzędzia,czujniki itd.
Nie istnieją urządzenia najlepsze i to do wszystkich zastosowań, więc przy doborze konkretnego systemu nawigacji dla chirurgii należy brać pod uwagę wiele czynników.Oczywiście czynnik ekonomiczny zawsze brany jest pod uwagę, jednak kluczowe znaczenie ma rodzaj operacji wykonywanych z pomocą takiego urządzenia. Do większości operacji w obrębie głowy, kręgosłupa, czy też stawów najkorzystniejszy wydaje się system optyczny i to III-ej generacji (np. firmy OptiNav). Przy zabiegach wymagających dużej precyzji wprowadzania igły czy wkręcania śrub właściwym wydaje się system magnetyczny (np. Aurora firmy Northern Digital).
Oczywiście w powyższych zastosowaniach świetnie sprawdzą się systemy optyczne II-ej generacji, o których wielu zaletach na pewno świadczy fakt wielkiej ich popularności na rynku medycznym (najbardziej popularny chyba system Polaris firmy Northern Digital –kilka tysięcy sztuk w użyciu na całym świecie). Jednak prostota, łatwość użycia i adaptacji,a także względy ekonomiczne powinny skłaniać do wyboru najnowszych zdobyczy technologicznych w tej branży - takich jak firmy OptiNav.
Biorąc pod uwagę zbliżony interfejs wymiany danych pomiędzy urządzeniem nadawczo-odbiorczym IR Polaris i komputerem obrabiającym dane oraz kamerami wizyjnymi i komputerem stosowanymi przez OptiNav można przypuszczać, że przy niewielkim nakładzie pracy i modyfikacji interfejsu softwarowego (sterowniki, biblioteki dll,platforma systemowa) możliwe jest podłączenie kamer wizyjnych firmy OptiNav do istniejących systemów IGS.
Reasumując, możliwe jest w miarę płynne i bezbolesne przejście z systemów II generacji na systemy III generacji (OptiNav) - tańsze w eksploatacji i dające większe możliwości wykorzystania. Przypuszczalnie w najbliższych latach większość firm zajmujących się rozwiązaniami IGS będzie rozważała zastosowanie systemów optycznych III generacji (systemów opartych na kamerach wizyjnych) co wydaje się naturalną tendencją rozwoju technologicznego oraz, co może ważniejsze, ograniczania kosztów eksploatacyjnych.
Opracował: Arkadiusz Śmigielski, OptiNav
![]()