Pracując nad kamerami i systemami wizyjnymi do pracy w wodzie należy pamiętać o tym, jak obraz z kamery różni się od tego podmorskiego. Rozumiejąc to firma Kraken Robotics z Mount Pearl w Kanadzie opracowała laserowy skaner podmorski RGB 3D stworzony do pracy w różnorodnych warunkach podwodnych.
Skaner, który jest oferowany jako samodzielne urządzenie do zdalnie sterowanych pojazdów lub podwodnych bezzałogowych pojazdów, umożliwia inspekcję zasobów morskich w tym podwodnego okablowania, kadłubów statków, łańcuchów kotwic, śmigieł, rurociągów ropy i gazu, a także monitorowanie i analizę wzrostu koralowców.
„W sytuacjach, gdzie nurek musi zejść pod wodę i zmierzyć coś ręcznie, może zostać zastąpiony przez pojazd autonomiczny wraz z naszym skanerem. Pozwala to uchronić człowieka przed potencjalnym niebezpieczeństwem, a skaner umożliwia badanie potencjalnego zagrożenia i tworzy pełną rekonstrukcję 3D zniszczonego obszaru.” – zapewnia Patrick Paranhos, dyrektor rozwoju biznesowego Kraken Robotics.
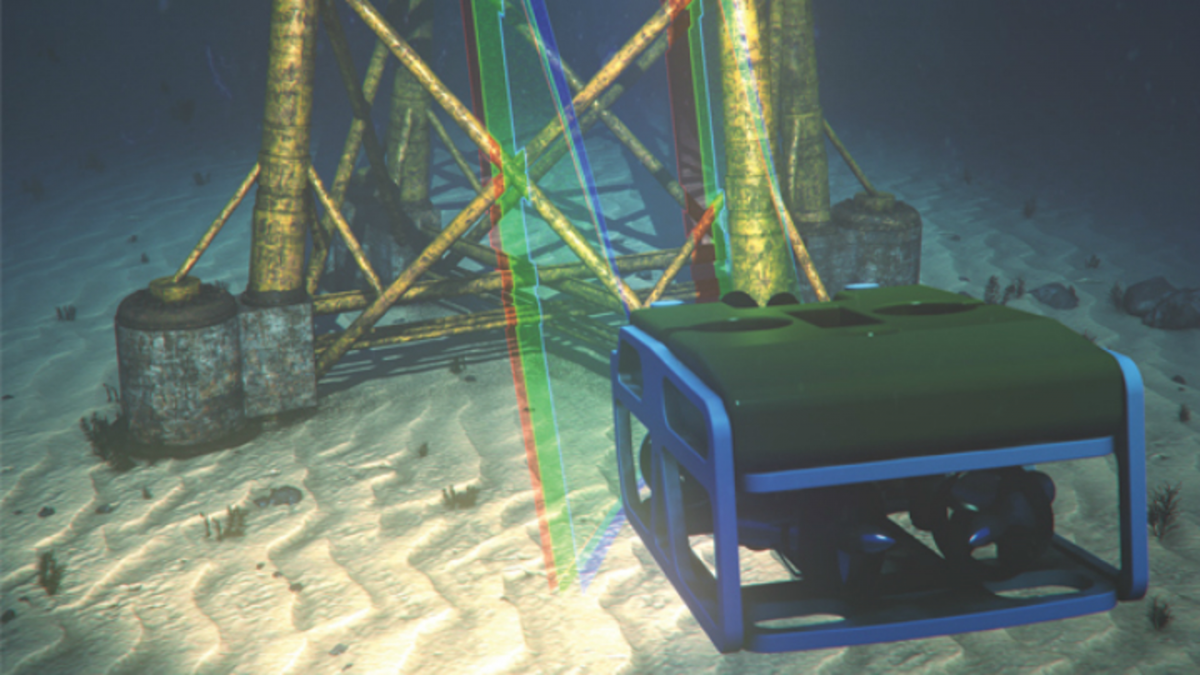
System skanera składa się z dwóch cylindrycznych kapsuł skanera mierzących 460 x 113 mm. Każda kapsuła ma kamerę o widoczności przy słabym świetle 1280 x 960, które osiągają prędkość do 144 klatek na sekundę oraz trzy lasery FLEXPOINT MVnano od firmy Laser Components – jeden czerwony, jeden niebieski i jeden zielony. Kamera z pierwszej kapsuły obserwuje laser z drugiej kapsuły, podczas gdy kamera z drugiej kapsuły obserwuje laser z pierwszej. W ten sposób tworzony jest system bliźniaczego światła strukturalnego o zasięgu podstawowym od 20 do 200 cm.
„Mniejsze zasięgi podstawowe są preferowane dla mniejszych pojazdów i operacji na mniejszych dystansach w celu zmierzenia obiektów, gdy dłuższe są dedykowane do operacji długodystansowych.” – twierdzi Paranhos. – „ Głębia dokładności lasera jest zależna od podłoża, więc im większa powierzchnia podłoża, tym lepiej.”
Oprogramowanie do automatycznej kalibracji systemu pozwala na elastyczne dopasowanie opcji systemu do różnorodnych pojazdów – od obserwacyjnych do robotniczych – i umożliwia kalibrację w terenie, która jest wymagana za każdym razem, gdy system jest instalowany w nowej konfiguracji na pojeździe.
Obrazy rejestrowane przez skanery służą do stworzenia modelu 3D we wbudowanym procesorze GPU, który umożliwia przygotowanie pełnego skanu 3D zawierającego do 1.2 miliona punktów w 4 sekundy.
Każdy skaner składa się z kamery i laserów RGB. Lasery są sterowalne z wbudowanymi LEDami zapewniającymi odpowiednie oświetlenie. Lasery różnych kolorów i długości fali zachowują się różnie pod wodą. Zmienność temperatury, zasolenia, rozpuszczony gaz, pływające cząsteczki i kolor powierzchni wpływają na absorpcję laserową, rozpraszanie i odbicie. Długość fali niebiesko-zielonej ma najgłębsze przenikanie, podczas gdy czerwona jest rozpraszana na krótszych dystansach. Laserowy skaner RGB oferuje elastyczność w optymalizowaniu koloru lasera do operacji i środowiska.
W praktyce operator prowadzi pojazd sterowany zdalnie do punktu wymaganej inspekcji, a kamera zapewnia operatorowi obraz całego otoczenia. Gdy operator włączy funkcję pomiaru, lasery wykonują skan przestrzeni, w wyniku którego w oprogramowaniu tworzona jest chmura punktów.
Jednym wyzwaniem w tej aplikacji jest to, że pojazd zdalnie sterowany porusza się w trakcie skanu, który trwa 4 sekundy. Ten ruch jest kompensowany w dalszej obróbce za pomocą autorskiego algorytmu zdolnego do pomiaru ruchu pojazdu bez dodatkowych czujników zewnętrznych.
System podwójnego skanowania ma zasięg 80
o x 50
o a szybkość skanowania wynosi do 0.1 do 1 Hz z obszarem roboczym od 0.5 do 8 metrów. W odległości 2 metrów od skanera rozdzielczość osiąga od 0.1 do 3 mm, w odległości 5 metrów od 1 do 10 mm.
„SeaVision tworzy chmurę punktów na podstawie pomiarów objętości, odległości i kształtu analizowanych obiektów. System pozwala również na obserwacje zmian między dwoma chmurami punktów, która może być konieczna w przypadku analizy koralowców.” – tłumaczy Paranhos.
SeaVision jest również używana jako zasób narzędzi cyfrowych w partnerstwie z GE’s Avitas Systems z Bostonu. Gdy skanery zbierają obrazy HDR i chmury punktów, są przesyłane do chmury danych, skąd oprogramowanie Avitas Systems przetwarza je i segreguje z odpowiednimi lokalizacjami i komentarzami. Platforma do analizy danych używa wyuczonych algorytmów sztucznej inteligencji do rozpoznania obiektów, detekcji zmian otoczenia i możliwości pomiarowych. Różnorodność analizowanych obrazów pozwala na użycie technik uczenia maszynowego w oprogramowaniu Avitas Systems.
Jedna wersja skanera może zejść na głębokość 1000 metrów, gdy inna aż do 3000 metrów. Kraken Robotics stworzył również indywidualną wersję systemu na głębokość 6000 metrów.
Źródło:
www.vision-systems.com